Dobb·E
About Dobb·E
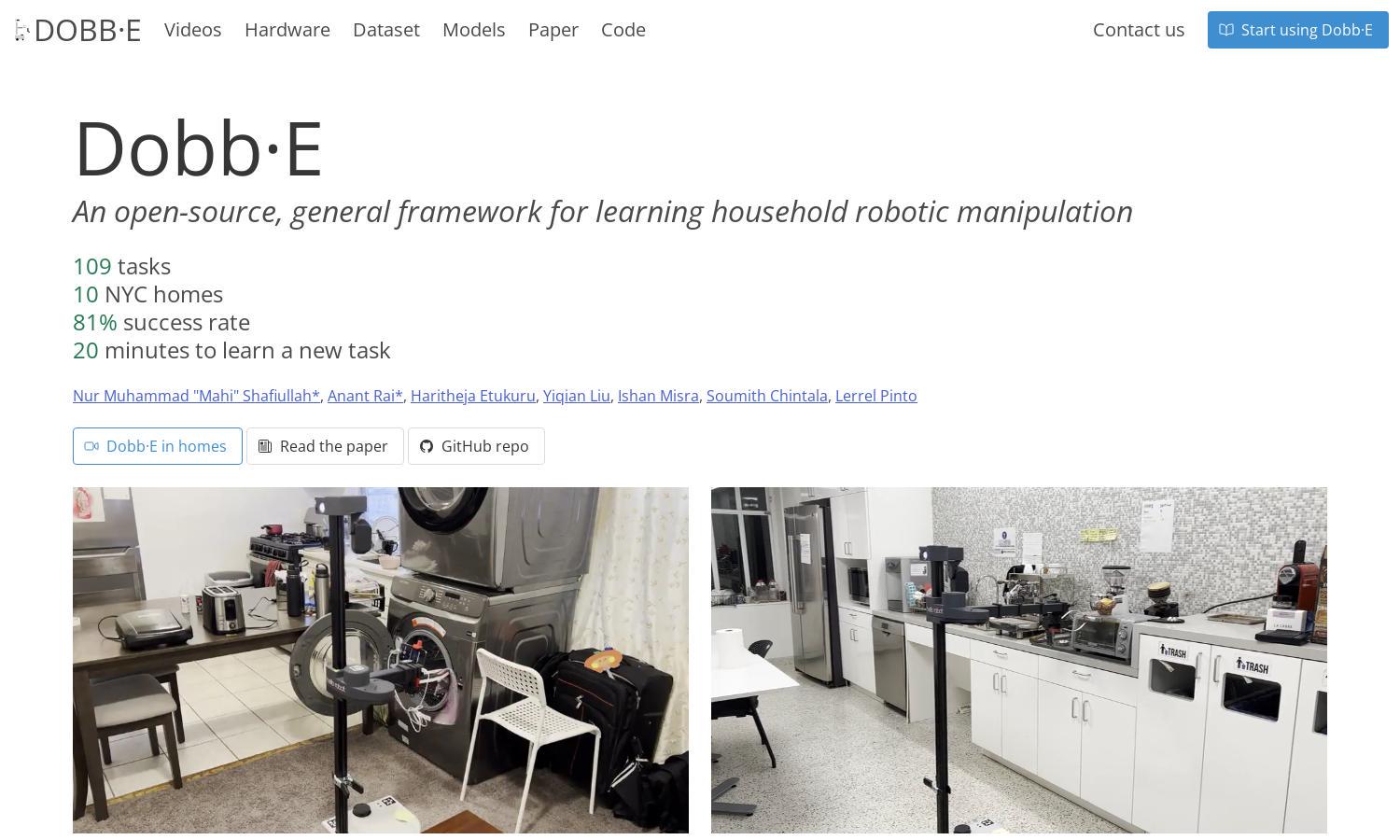
Dobb·E is a groundbreaking open-source platform designed to teach robots household tasks utilizing imitation learning. With its unique Stick tool, users can demonstrate tasks in just five minutes, allowing Dobb·E to adapt and learn tasks quickly. Achieving an 81% success rate, it aims to make home robotics accessible and effective for everyone.
Dobb·E offers free access to its software and models, with detailed documentation available online. While the core features are free, users can explore additional premium resources for enhanced efficiency and support. Upgrading provides benefits like priority access to new features and specialized support within the robotic learning community.
Dobb·E features a user-friendly interface that simplifies training and task management for home robots. The platform's intuitive layout allows users to easily access its tools, demonstrate tasks, and analyze performance data, ensuring a seamless experience. Dobb·E focuses on providing a robust yet approachable design for both new and experienced users.
How Dobb·E works
Users begin by onboarding with Dobb·E, obtaining the Stick tool to demonstrate tasks to robots in their homes. After demonstrating the task for five minutes, Dobb·E utilizes the Homes of New York dataset to adapt and learn within 20 minutes, achieving an impressive success rate. The platform's simple interface allows for easy navigation through various features, enabling users to effectively monitor robot performance and manage tasks seamlessly.
Key Features for Dobb·E
Imitation Learning Framework
Dobb·E's imitation learning framework enables robots to learn household tasks quickly and efficiently. By using a demonstration tool called the Stick, users can teach tasks in just five minutes, allowing for rapid adaptation to new environments and achieving high success rates in robot performance.
Homes of New York Dataset
The Homes of New York dataset, crucial to Dobb·E, contains 13 hours of diverse interaction data from 22 homes. This dataset enables the training of robotic models to perform tasks accurately and effectively in various household settings by providing rich, annotated training material.
Home Pretrained Representations (HPR)
Home Pretrained Representations (HPR) is a vital model within Dobb·E that allows seamless adaptation for new tasks. Pre-trained on the extensive HoNY dataset, HPR serves as a reliable foundation for robotic policies, significantly enhancing the performance of robots in domestic environments.